Nobody told the angle is 90 degrees. The angle is more like 45 degrees, but may be different - that also depends on the speed and the profile of the hydrofoil (if profiled hydrofoil is used), and some other factors.
However, I have to repeat again, with plain feet, or with a short non-flexible blade fixed to the feet, you will simply not manage to set the blade/hydrofoil/feet into the right angle during the entire cycle (minus the dead points), while you do manage keeping good attack angle for considerable parts of the cycle with a flexible blade, or with a hydrofoil with a variable angle, like at the Aqueon.
So, of course, you can propulse even with the non-flexible fin, but you need to exercise full force in the moment the blade is in the best attack angle, and then relax for the rest of the cycle. Unlike that, at flexible fins, or the Aqueon, you transform the kicking energy into the forward motion for much longer parts of the cycle.
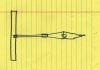
To make it more clear I designed the following (very) simplified diagrams. They both represent only one half of the cycle (the downward kick). The real-life situation is little bit more complex (beside others, to certain limited degree, you improve the angle of attack with your feet and knee bends), but for understanding the principle the diagram is more comprehensible in this way.
The first one if for a fix blade/hydrofoil - the blade is in the right attack angle only in one part of the top half of the kick. Only there it transforms the kick energy into some thrust, but the transformation is the lower, the further down you kick. At the bottom you actually brake. I designed only the more interesting vertical and horizontal resulting forces, but correctly the force has both vertical and horizontal elements at each point.

There could be a second diagram for the upward kick that would look practically identical, just the smaller green part (thrusts) would be at the bottom.
The second diagram shows a system with a variable angle of the blade or hydrofoil (meant variable to the leg). It stays in the ideal angle of attack during almost the entire half cycle. There would be an inefficient part only at the dead end, during reversing the kick from down to up, when the hydrofoil flips to the opposite direction, taking again the ideal angle of attack for the upward kick. But the entire upward kick would be fully efficient (green) again.
At a profiled hydrofoil, the situation is little bit different than at a flat blade. While hydrofoil may work also with a fixed angle (at high speeds and a very low kick amplitude), you need to maintain the attacking blade side under the right angle as much as possible during the cycle, to keep the efficiency high. You can achieve it either by limiting the kick amplitude or prolongating the lever (the angle at the extremity of the kick must be smaller than the angle beween hydrofoil sides), or you need to add a variable angle similarly like at the example above.

 HARmono_600x.jpg81 KB · Views: 140
HARmono_600x.jpg81 KB · Views: 140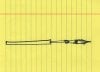 LARmono_600x.jpg75 KB · Views: 134
LARmono_600x.jpg75 KB · Views: 134 45fullmono_600x.jpg78.9 KB · Views: 127
45fullmono_600x.jpg78.9 KB · Views: 127 chevronmono_600x.jpg81.3 KB · Views: 128
chevronmono_600x.jpg81.3 KB · Views: 128


