We did some pre-training to give Tom a chance to work on the turns in the Aqueon but really it probably still needs figuring out. Basically when he got to the end he touched with his hand and then swivelled (rotated) around with his hands before setting off again in the opposite direction. There should be video someplace, I'll see if I can get a hold of it and post it up here.
Guest viewing is limited
- You have a limited number of page views remaining
- 4 guest views remaining
- Register now to remove this limitation
-
Welcome to the DeeperBlue.com Forums, the largest online community dedicated to Freediving, Scuba Diving and Spearfishing. To gain full access to the DeeperBlue.com Forums you must register for a free account. As a registered member you will be able to:
- Join over 44,280+ fellow diving enthusiasts from around the world on this forum
- Participate in and browse from over 516,210+ posts.
- Communicate privately with other divers from around the world.
- Post your own photos or view from 7,441+ user submitted images.
- All this and much more...
You can gain access to all this absolutely free when you register for an account, so sign up today!
Flying Underwater, A Blast From The Past
- Thread starterricki
- Start date
Thread Status: Hello
, There was no answer in this thread for more than 60 days.
It can take a long time to get an up-to-date response or contact with relevant users.
It can take a long time to get an up-to-date response or contact with relevant users.
Hi Trux and Rick,
I'd been toying with the idea of competing with the Aqueon since I got it. I spent a fair bit of time training with it three years ago but haven't used it much since then. The CAFA competition seemed like a golden opportunity to put some numbers up despite a lack of recent training with it.
To be perfectly honest, the Aqueon in its current form is no revolution in underwater propulsion. The improvement in efficiency is more than eaten up in increased drag, incredible mass (>20lbs) and difficult maneuverability. Still, it is a fun device to fly and I'm glad I dusted it off for the comp.
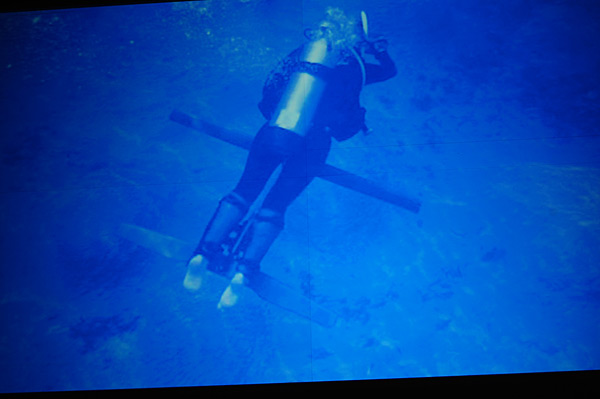
The constant ballast dive was the most daunting, both for me and for the organizer. The wide wings of the Aqueon don't mix well with the lanyard and the descent line. One has to be keenly aware at all times where all of these things are, especially at the start and turn. A back flip with head to the wall is the only way to start as it finishes with the diver facing the line with minimal risk of entanglement. The sink phase was very slow so I had to pump the blade occasionally to keep some forward momentum. At the turn I had to swing my body well clear of the plate to avoid knocking the bottom camera. On the start of the ascent I typically feel like I don't have much power against the negative buoyancy but at 20m and shallower I feel like I can outrun anything with the Aqueon.
Dynamic apnea presents its own challenges, especially in a 25m pool. Obviously the turns are inherently difficult. The only way to turn is to keep level and straight. Any tilt would drive the wing tips into the bottom and any bending of the knees would hammer the front blade into the bottom. It is therefore necessary to scull with the hands to finish the turn. The aqueon is not very efficient at low speed so it is necessary to push a bit harder than otherwise ideal.
The Aqueon takes a life of its own at medium fast speed. The blade suddenly grabs the water and you propel yourself more by leaning against the blade than by moving it. You have to forget everything you know about the monofin; pump entirely from the legs and relax the upper body.
Tom
I'd been toying with the idea of competing with the Aqueon since I got it. I spent a fair bit of time training with it three years ago but haven't used it much since then. The CAFA competition seemed like a golden opportunity to put some numbers up despite a lack of recent training with it.
To be perfectly honest, the Aqueon in its current form is no revolution in underwater propulsion. The improvement in efficiency is more than eaten up in increased drag, incredible mass (>20lbs) and difficult maneuverability. Still, it is a fun device to fly and I'm glad I dusted it off for the comp.
The constant ballast dive was the most daunting, both for me and for the organizer. The wide wings of the Aqueon don't mix well with the lanyard and the descent line. One has to be keenly aware at all times where all of these things are, especially at the start and turn. A back flip with head to the wall is the only way to start as it finishes with the diver facing the line with minimal risk of entanglement. The sink phase was very slow so I had to pump the blade occasionally to keep some forward momentum. At the turn I had to swing my body well clear of the plate to avoid knocking the bottom camera. On the start of the ascent I typically feel like I don't have much power against the negative buoyancy but at 20m and shallower I feel like I can outrun anything with the Aqueon.
Dynamic apnea presents its own challenges, especially in a 25m pool. Obviously the turns are inherently difficult. The only way to turn is to keep level and straight. Any tilt would drive the wing tips into the bottom and any bending of the knees would hammer the front blade into the bottom. It is therefore necessary to scull with the hands to finish the turn. The aqueon is not very efficient at low speed so it is necessary to push a bit harder than otherwise ideal.
The Aqueon takes a life of its own at medium fast speed. The blade suddenly grabs the water and you propel yourself more by leaning against the blade than by moving it. You have to forget everything you know about the monofin; pump entirely from the legs and relax the upper body.
Tom
Thanks for undertaking this experiment and reporting back on your approach and impressions. Congratulations on your world record Aqueon performances. You are the first to do so to my knowledge.
What aspects of the Aqueon design would you work in modifying for DYN and CWT if any? Things like going to composite materials to reduce weight (momentum too though), changing the foils to a swept back tapered configuration (more whale caudal fin-like) with a deflectable trailing edge vs. the current orthogonal wooden foil setup relative to the kneel of the Aqueon, positive securing of the foils to avoid accidental loss during performances. What other ideas come to mind? Cal told me that others had tried some of these mods with limited change in performance characteristics. Then again I doubt they were concerned about competitive considerations.
Thanks and congratulations again!
Rick


Images from Amazing Underwater Flight! - FKA Kiteboarding Forums

humpback whale tail pictures from wildlife photos on webshots
.
What aspects of the Aqueon design would you work in modifying for DYN and CWT if any? Things like going to composite materials to reduce weight (momentum too though), changing the foils to a swept back tapered configuration (more whale caudal fin-like) with a deflectable trailing edge vs. the current orthogonal wooden foil setup relative to the kneel of the Aqueon, positive securing of the foils to avoid accidental loss during performances. What other ideas come to mind? Cal told me that others had tried some of these mods with limited change in performance characteristics. Then again I doubt they were concerned about competitive considerations.
Thanks and congratulations again!
Rick
Images from Amazing Underwater Flight! - FKA Kiteboarding Forums
humpback whale tail pictures from wildlife photos on webshots
.
Last edited:
I think that reducing the mass would go a long way. Reducing friction on the moving parts would help too. Just bumping the spring can suddenly make the Aqueon want to roll over to one side. I always thought that ankle operated pivots on the rear stabilizer fins would help quite a bit in stearing. I don't know if anything could help in turns with Dynamic though.
I have a feeling that any kind of swept back design would detract from the basic propulsion. The rear stabilizer might be a different story and that is the aspect that is the biggest risk for entanglement. It would be interesting to try the Aqueon without the rear stabilizer and use fins instead for stabilizing and steering.
I feel an experiment coming on.")
I have a feeling that any kind of swept back design would detract from the basic propulsion. The rear stabilizer might be a different story and that is the aspect that is the biggest risk for entanglement. It would be interesting to try the Aqueon without the rear stabilizer and use fins instead for stabilizing and steering.
I feel an experiment coming on.
Good points, particularly about sliding the foils out on the axel by accident. Worse what if one falls off at depth?! Something more positive with less friction would be a strong advantage. Your suggestion of a mobile ankle mount is intriguing if I follow your meaning. That would allow more deflection of the front foils with less effort, hence easier, tighter and faster turning of the Aqueon. Also, you probably noticed the boards can become uncomfortable, it would be nice to avoid that with your ankle mounts. As DARPA ran off with Cal's idea, some study of their more contemporary design would be helpful in considering changes.
Sweeping back the front foils would impact your displacement in strokes but it would also reduce drag. I think the ability to feather the trailing edge of the foils would provide some strong advantages as well providing less turbulence through strokes. The rear stabilizer serves to provide resistance to excessive pitch oscillations through the sinusoiding of the front foils. You simply need something of adequate reactive force to stop you from seesawing in place through the motion of the front or propulsion foils. Going with symmetrical foils made sense from a production and performance standpoint using wood construction decades back when Cal developed this. With synthetics you could variation size, aspect ratio, etc.. Perhaps you could come up with something which would provide the necessary pitch stabilization without the excessive width. Perhaps something longer again with trailing edges that could also be feathered. I don't think fins would provide sufficient surface area to do this at least not with the current front foils. In the case of a monofin, I am less certain. When I mentioned narrowing and increasing the length of the stabilizer I was thinking of something roughly in the shape of an odd monofin. It would need to likely have more blade resistance than a monofin you would like to use on its own though, I think? It seems if your stabilizer was too long it would create excessive drag from projected area. This is one good reason to try to stick with narrower, longer foils as are currently in use.
Good stuff to work on! Other ideas out there?
Rick
DARPA PowerSwim Video
PowerSwim by Jay Lowell, DSO Program Manager - YouTube
From: How to become a mad scientist for DARPA. - By Daniel Engber - Slate Magazine
and still more:


From: Ares Homepage
Sweeping back the front foils would impact your displacement in strokes but it would also reduce drag. I think the ability to feather the trailing edge of the foils would provide some strong advantages as well providing less turbulence through strokes. The rear stabilizer serves to provide resistance to excessive pitch oscillations through the sinusoiding of the front foils. You simply need something of adequate reactive force to stop you from seesawing in place through the motion of the front or propulsion foils. Going with symmetrical foils made sense from a production and performance standpoint using wood construction decades back when Cal developed this. With synthetics you could variation size, aspect ratio, etc.. Perhaps you could come up with something which would provide the necessary pitch stabilization without the excessive width. Perhaps something longer again with trailing edges that could also be feathered. I don't think fins would provide sufficient surface area to do this at least not with the current front foils. In the case of a monofin, I am less certain. When I mentioned narrowing and increasing the length of the stabilizer I was thinking of something roughly in the shape of an odd monofin. It would need to likely have more blade resistance than a monofin you would like to use on its own though, I think? It seems if your stabilizer was too long it would create excessive drag from projected area. This is one good reason to try to stick with narrower, longer foils as are currently in use.
Good stuff to work on! Other ideas out there?
Rick
Last edited:
I had a look at the patents relating to the Aqueon. Calvin's 1964 patent drawing actually shows a design with forward-swept wings. It also has a rear stabilizer that can be tilted with the feet.
GONGWER - Google Patents
The design from Calvin's 1974 patent is the classic Aqueon. It's main innovations are that it is collapsible for transport and the blade can be easily reversed for foot-first swimming. (I need to try that) It also looks quite a bit lighter than the original design.
SWIMMER PROPULSION DEVICE - Google Patents
Other drawings I've seen show a fair degree of experimentation on that theme, with wings of various sizes and proportions.
Deka's main patent for its PowerSwim, dated August 2, 2011 can be found here:
Swimming propulsion device - Google Patents
It cites all of Calvin's Aqueon patents and several others. What it brings to the table are modern materials and manufacturing methods and a slicker method of attaching the legs. The cuffs look more comfortable and have quick-release bindings to separate the cuffs from the device. The wing is also wider, thinner and slightly back-swept.
There are a LOT of drawings in Deka's patent and they reflect a great deal of experimentation in blade shape and leg attachment. They also seem to have tried a foot operated rear stabilizer. Interestingly, the 'exemplary embodiment' looks more like the classic Aqueon than the other variations shown.
Deka's patent also shows some interesting performance graphs. Wider blades seem to be more efficient and (regardless of wing size) there seems to be a sweet spot around 70 kicks per minute. That correlates well with my personal experience with the Aqueon but if I kick at that rate then I'm moving well over 2 knots, which throws me way off the other speed related graphs.
There's lots of information out there. Hopefully that provides some food for thought.
Tom
GONGWER - Google Patents
The design from Calvin's 1974 patent is the classic Aqueon. It's main innovations are that it is collapsible for transport and the blade can be easily reversed for foot-first swimming. (I need to try that) It also looks quite a bit lighter than the original design.
SWIMMER PROPULSION DEVICE - Google Patents
Other drawings I've seen show a fair degree of experimentation on that theme, with wings of various sizes and proportions.
Deka's main patent for its PowerSwim, dated August 2, 2011 can be found here:
Swimming propulsion device - Google Patents
It cites all of Calvin's Aqueon patents and several others. What it brings to the table are modern materials and manufacturing methods and a slicker method of attaching the legs. The cuffs look more comfortable and have quick-release bindings to separate the cuffs from the device. The wing is also wider, thinner and slightly back-swept.
There are a LOT of drawings in Deka's patent and they reflect a great deal of experimentation in blade shape and leg attachment. They also seem to have tried a foot operated rear stabilizer. Interestingly, the 'exemplary embodiment' looks more like the classic Aqueon than the other variations shown.
Deka's patent also shows some interesting performance graphs. Wider blades seem to be more efficient and (regardless of wing size) there seems to be a sweet spot around 70 kicks per minute. That correlates well with my personal experience with the Aqueon but if I kick at that rate then I'm moving well over 2 knots, which throws me way off the other speed related graphs.
There's lots of information out there. Hopefully that provides some food for thought.
Tom
Hi All and sorry for reviving this old thread.
I find the Aqueon quite interesting and would like to know if any of you were successful in making a replica (besides DARPA .. ;- )
I would like to get some lessons learned feedback before I try to make my own.
TIA
Johnny
I find the Aqueon quite interesting and would like to know if any of you were successful in making a replica (besides DARPA .. ;- )
I would like to get some lessons learned feedback before I try to make my own.
TIA
Johnny
I haven't made any progress with my project yet. I made a lamination for the wing, but I don't really like it. So I will either use it, or maybe start over. I came into a lot of cheap carbon since starting, so that is an option I did not initially have.
This was part of a project I had to make several things that appeared in the PMs of my youth, and I have reduced the number to three objects a fishing kick boat, an outboard sail unit, and the aqueon. Still on the to do list. Have the boat done.
This was part of a project I had to make several things that appeared in the PMs of my youth, and I have reduced the number to three objects a fishing kick boat, an outboard sail unit, and the aqueon. Still on the to do list. Have the boat done.
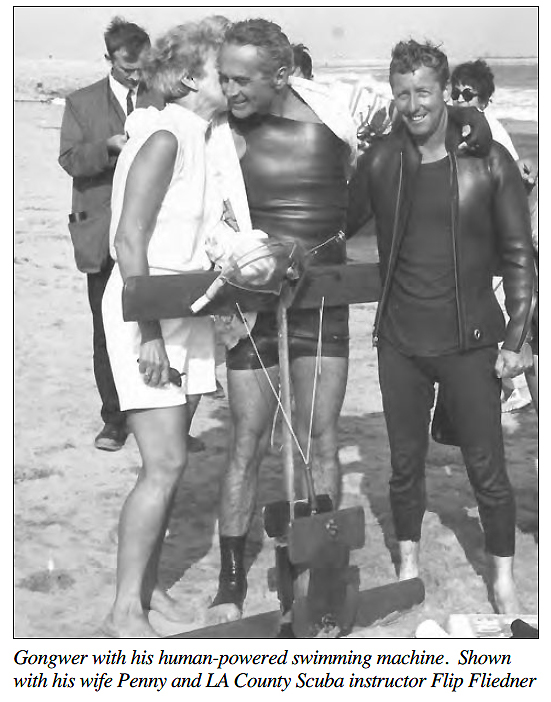
I just learned the inventor of the Aqueon and dozens of other undersea devices, Calvin Gongwer passed away. He was an innovator to be sure, rest in peace Cal. More at: http://fksa.org/showthread.php?p=51252#post51252
I don't think the aqueon was fully appreciated, it totally changed the motion from that of a kick to a squat which is one of if not the most powerful body motions, this has a second benefit of allways being in a very streamlined position. All other fins, monofins of all types and bifins use a kick which uses up a good percentage of the available power just to move the legs up and down through the water, whilst this also creates thrust it does so at extreme inefficiency , plus it puts the body into a higher drag position. I understand its limits in the pool especially a 25m one and it has some problems for ocean freediving too ,but for general ocean diving including scuba I think its better than any monofin by taking out the body pitching altogether. Many monofinners I think had a hard time taking the kick out and just using a squatting motion ie keeping your foot hips and head allways in a straight line and just moving the knees outwards. It's best speed cant be compared to the best monofinners speed because the top monofinners talent is more than likely far rarer than that of the people who have used the aqueon, the best monofinners are probably 1 in a 100000 or there abouts.
Calvin lived a good long life. I think his longevity is at least partly due to keeping in such good shape promoting and demonstrating his favorite invention. I was sad to hear that he is gone.
However, as inventions go, there are good reasons that almost everyone uses a monofin or bifins rather than an aqueon. It is a device that is highly optimized for straight, constant swimming at the expense of everything else. (maneuverability, portability, safety, start power...) The aqueon's extra mass and drag mostly negates any hydrodynamic advantage. It's better than a monofin for surface swimming but underwater, a monofin is far more efficient, responsive and safe, especially coming up from a deep dive. A monofin gives you significant power right from the start of a kick, whereas the aqueon needs a few kicks to get some forward momentum before the power starts.
I'll never forget the feeling of using my monofin after using the aqueon almost exclusively for the better part of a dive season. Suddenly I felt like a superhero. With a monofin I had speed, power, acceleration and low-speed maneuverability. I could also get close to things and people without bashing them with my fin.
Sorry to burst any bubbles.
Tom
However, as inventions go, there are good reasons that almost everyone uses a monofin or bifins rather than an aqueon. It is a device that is highly optimized for straight, constant swimming at the expense of everything else. (maneuverability, portability, safety, start power...) The aqueon's extra mass and drag mostly negates any hydrodynamic advantage. It's better than a monofin for surface swimming but underwater, a monofin is far more efficient, responsive and safe, especially coming up from a deep dive. A monofin gives you significant power right from the start of a kick, whereas the aqueon needs a few kicks to get some forward momentum before the power starts.
I'll never forget the feeling of using my monofin after using the aqueon almost exclusively for the better part of a dive season. Suddenly I felt like a superhero. With a monofin I had speed, power, acceleration and low-speed maneuverability. I could also get close to things and people without bashing them with my fin.
Sorry to burst any bubbles.
Tom
I'm praising the underlying design not the nuts and bolts of the build of a particular model,I consider the darpa ripoff of the aqueon still to be an aqueon, yes the materials need to be updated, carbon fiber wings allows for far less weight and thinner profiles that reduce the drag , yes I totally agree it is best suited to continuous swimming in open water.
The underlying design is what makes the Aqueon hard to maneuver, almost impossible to do a forward surface dive and completely impossible to provide safety support for other divers. Advanced materials can only provide incremental improvement to performance. It will always be heavier than a monofin.
The aqueon is a neat idea but it isn't very practical for human use. I could see it being useful for autonomous robotics though. In fact, I think there was a long range robotic surf board that used wave power to drive what looked like little aqueon blades.
The aqueon is a neat idea but it isn't very practical for human use. I could see it being useful for autonomous robotics though. In fact, I think there was a long range robotic surf board that used wave power to drive what looked like little aqueon blades.
The underlying design is what makes the Aqueon hard to maneuver, almost impossible to do a forward surface dive and completely impossible to provide safety support for other divers. Advanced materials can only provide incremental improvement to performance. It will always be heavier than a monofin.
The aqueon is a neat idea but it isn't very practical for human use. I could see it being useful for autonomous robotics though. In fact, I think there was a long range robotic surf board that used wave power to drive what looked like little aqueon blades.
I think your perspective is overly based on the freediving side of things, that I do not know was even in Cal's mind. He seemed more involved in HPV type stuff and horizontal marathons. I don't know how it worked out for the Seals, but they have a very broad swimming range, all kinds of different purposes. They use multiple fin types, and I have not seen that they used monofins, but if it fills in anything, they probably do.
My personal interest is in survival swimming, which I think of as anything that might cause me unexpectedly to end up in the water. To me the Aqueon is more like a lifejacket in that it is a one size fits all device that one could have on board a boat, and use in cases where swimming is important from towing to covering some distance.
Obviously it is important how it works in freediving, but most of us are around the water for other purposes. The biggest downside is that it never sold, which places it's functionality, not to mention availability, into question.

I'm reading that some of you with building talent are considering revisiting the idea. Here is an incomplete thought to throw in the mix that I've been wondering about.....
Has anyone noticed the pedal powered flapping "Mirage" fin system that has become commercially successful propelling Hobie Cat kayaks faster than hand paddled racing sculls? Have you wondered if it could be adapted to an underwater swimmer? Having to imagine the Aqueon swimming movement since I've never seen it but it sounds more like a shallow squat than a dolphin kick.
Could that Aqueon motion be adapted to drive the well developed Hobie mechanism??? Think penguin drive!
Is there an Aqueon motion swimmer reading who could envision this and say it's reasonable or not so much?
Last edited:
On the SEALS and monofin question. Being former special forces myself I asked Ted Ciamillo, inventor of the Lunocet monofin that question. He had demoed a previous version for the SEALS. They liked it but didn't bite. His Lunocets have come a long way forward since then so who knows what the future may hold?
hi at all,
an interesting discussion about nice historical gear..... I found this video about it
http://www.britishpathe.com/video/new-water-device/query/SWIMMING+ON
I´d like to try a homebuilt....project for a winter....
an interesting discussion about nice historical gear..... I found this video about it
http://www.britishpathe.com/video/new-water-device/query/SWIMMING+ON
I´d like to try a homebuilt....project for a winter....
I don't think the aqueon was fully appreciated, it totally changed the motion from that of a kick to a squat which is one of if not the most powerful body motions, this has a second benefit of allways being in a very streamlined position. All other fins, monofins of all types and bifins use a kick which uses up a good percentage of the available power just to move the legs up and down through the water, whilst this also creates thrust it does so at extreme inefficiency , plus it puts the body into a higher drag position. I understand its limits in the pool especially a 25m one and it has some problems for ocean freediving too ,but for general ocean diving including scuba I think its better than any monofin by taking out the body pitching altogether. Many monofinners I think had a hard time taking the kick out and just using a squatting motion ie keeping your foot hips and head allways in a straight line and just moving the knees outwards. It's best speed cant be compared to the best monofinners speed because the top monofinners talent is more than likely far rarer than that of the people who have used the aqueon, the best monofinners are probably 1 in a 100000 or there abouts.
Kick and squatting motions are fairly similar. It is the monofin core undulation that is different. The undulation has drag advantages, but a kick squat can be used with monofins as well (to varying degrees depending on the monofin). Take a look at the kick stroke i am using in this X-15 monofin on scuba (video below). It is indistinguishable from the Aqueon kick stroke. Like with the Aqueon, the upper body is stable and not pitching.
The Aqueon is an interesting invention, but it had real issues that prevented it from going mainstream. Some of us, who have followed, have taken the lessons learned from the Aqueon and built upon them for even greater achievements. We can now go even faster, with less energy and be more maneuverable than was ever possible with the Aqueon. Cal is admired by those of us who have studied his work. He was a true inventor whose contributions will be long remembered.
The difference between the squat motion and a kick motion is that in the squatting technique over the stoke you barely break perfect form , drag wise. Plus if you look at how much effort goes into just moving the legs up and down during a kicking motion compared to how much effort goes into moving the fin I think you'll find a much larger percentage of your effort going into moving your legs in the kick technique. With your fin the dolfin unlike other standard monofins I believe you can use a technique that has a similar drag profile to that of a the squatting motion ,but I believe you can only do it by putting in less power, for freediving purposes this probably doesn't matter as you don't put in full power, but for other types of swimming where putting in max effort for max speed is prefered it does.Kick and squatting motions are fairly similar. It is the monofin core undulation that is different. The undulation has drag advantages, but a kick squat can be used with monofins as well (to varying degrees depending on the monofin). Take a look at the kick stroke i am using in this X-15 monofin on scuba (video below). It is indistinguishable from the Aqueon kick stroke. Like with the Aqueon, the upper body is stable and not pitching.
The Aqueon is an interesting invention, but it had real issues that prevented it from going mainstream. Some of us, who have followed, have taken the lessons learned from the Aqueon and built upon them for even greater achievements. We can now go even faster, with less energy and be more maneuverable than was ever possible with the Aqueon. Cal is admired by those of us who have studied his work. He was a true inventor whose contributions will be long remembered.
Also just a query on your statement that undulating has drag advantages, to my knowledge the fastest and most efficient swimmers are the thunniform group , this group is characterised by minimal body pitching, with the tail fin being the only part that moves substantially.